Imagine a world hot enough to turn lead into a puddle, where the atmospheric pressure can crush a nuclear-powered submarine. Now imagine sending a rover to explore that world.
Venus, ancient sister of Earth with a planetary environment just this side of hellish, has been visited by a handful of probes since the early days of space flight. Of the many missions to our celestial neighbor, only about a dozen have made contact with the surface of the planet. The longest-lived landers only managed to function for a couple of hours before succumbing to the relentlessly oppressive heat and pressure.
Despite the punishing conditions, previous missions to Venus have nevertheless delivered important information, such as:
Surface temperature: in excess of 450°C
Surface pressure: 92 times that of Earth
Wind speeds: 0.3 – 1.3 meters per second
Due to the extreme pressure, this low wind speed feels almost like gale-force winds here on Earth
Length of Venusian day: 116 Earth days
NASA’s Jet Propulsion Laboratory (JPL), under a grant from the NASA Innovative Advanced Concepts (NIAC) program, is studying a mission concept to return to the surface of Venus, known as the Automaton Rover for Extreme Environments (AREE), something not accomplished since the Soviet Vega 2 landed in 1985.
Current, state-of-the-art, military-grade electronics fail at approximately 125°C, so mission scientists at JPL have taken their design cues from a different source: automatons and clockwork operations. Powered by wind, the AREE mission concept is intended to spend months, not minutes, exploring the landscape of our sister world. Built of advanced alloys, AREE will be able to collect valuable long-term longitudinal scientific data utilizing both indirect and direct sensors.
As the rover explores the surface of Venus, collecting and relaying data to an orbiter overhead, it must also detect obstacles in its path like rocks, crevices, and steep terrain. To assist AREE on its groundbreaking mission concept, JPL needs an equally groundbreaking obstacle avoidance sensor, one that does not rely on vulnerable electronic systems. For that reason, JPL is turning to the global community of innovators and inventors to design this novel avoidance sensor for AREE. JPL is interested in all approaches, regardless of technical maturity.
This sensor will be the primary mechanism by which the potential rover would detect and navigates through dangerous situations during its operational life. By sensing obstacles such as rocks, crevices, and inclines, the rover would then navigate around the obstruction, enabling the rover to continue to explore the surface of Venus and collect more observational data.
JPL has issued this Challenge to the global community because the rover must have the ability to successfully navigate in such a demanding environment in order to qualify for additional developmental funding. While the mission to the surface of Venus may be years off, the development of a suitably robust rover sensor will strengthen the case for returning to Venus with a rover, something that has never been attempted before.
What You Can Do To Cause A Breakthrough
Click ACCEPT CHALLENGE to sign up for the challenge
Share this challenge. Show your friends, your family, or anyone you know who has a passion for discovery.
Start a conversation in our Forum, or join an existing conversation, ask questions or connect with other innovators.
Guidelines
Challenge Breakthrough
Using ancient approaches and modern material science, design a mechanical obstacle avoidance sensor for usage on an off-world planetary rover.
Background
The goal of this single-stage challenge is to submit a fully mechanical sensor that meets the performance criteria listed below and can be incorporated into the existing AREE model – competitors do not need to demonstrate how their sensor will connect to the rover, only that their design can provide the desired functionality.
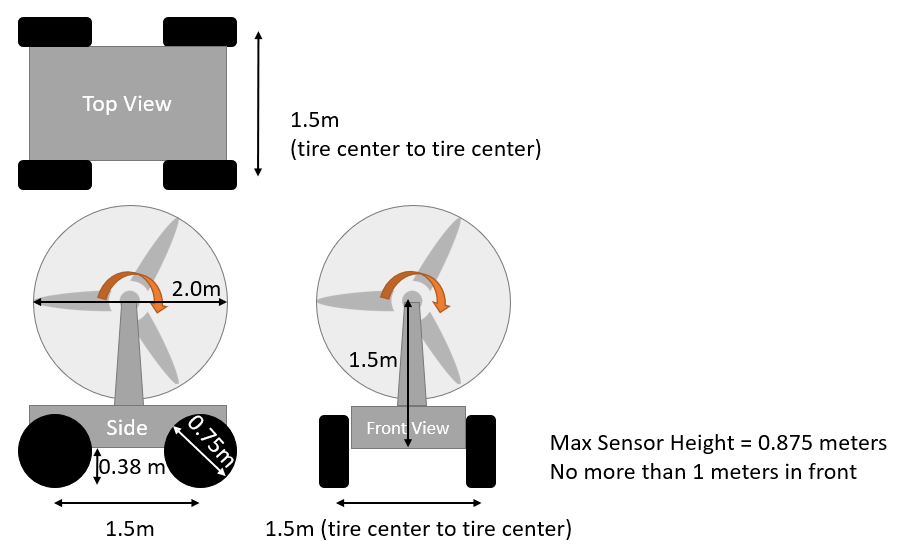
Below are several profile images of the rover, as currently envisioned by the design team:
The actuator in any proposed sensor must be able to move a 6 cm diameter pin by a minimum of 3 cm with 25 N of force when an obstacle is encountered. This, in turn, will then trigger the rover to back off the obstacle and seek a new pathway forward.
The sensor must reliably respond when encountering:
Slopes greater than 30 degrees (either up or down hill)
Slopes less than 25 degrees must not trigger the sensor.
Rocks greater than 0.35 meters in height
Sensor must not trigger for rocks smaller than 0.3 meters in height
Holes/valleys greater than 0.35 meters deep, except for small holes which would not entrap the wheels.
Sensor must not trigger for holes shallower than 0.3 meters in depth
Holes narrower than 0.1 meters wide may be ignored by the sensor but it is not required to do so
Holes less than 0.5 meters long in the direction of travel may be ignored by the sensor but it is not required to do so
Holes greater than 0.1 meters wide and greater than 0.5 meters long and greater than 0.35 meters deep must be detected.
To assist competitors, the following image demonstrates possible scenarios that the rover may encounter during its mission:
Additional performance criteria:
Proposed technology must be designed with an anticipated operational lifespan of at least 6 months
Some basic electrical components are acceptable: wires, resistors and inductors
Capacitors, microchips or diodes are not acceptable without strong and compelling evidence for their inclusion
Limited power for the sensor is available from the turbine:
Average of 1W of power with a maximum of 15W on a limited basis and with justification
Proposed sensor must be compatible with the following physical constraints:
Sensor must not extend more than 1m from the body of the rover, or more than 1 meter beyond the sides of the body
Sensor must not be more than 0.875m off the surface (note, when detecting an obstacle it may rise higher than this height)
Sensor must have a mass at or below 25kg
Proposed design must be capable of being assembled using environmentally appropriate materials
Inputs:
The maximum number of inputs are one rotating shaft and two wires
rotating shaft may be of any size, rotated at any speed, with any amount of torque desired
one wire for power, one for ground/neutral; maximum voltage difference across the wires shall be 18 V or less, and a maximum current of 600 mA (i.e. essentially can be driven by 2x 9V battery)
Can be assumed that the rover is capable of pushing the obstacle avoidance system with 150N of force
Outputs:
Obstacle detection mechanism must move a pin(s) or shaft(s) 3 cm axially, with a force of 25N
Current rover design specifies a single pin, however, multiple pins could be considered in order to achieve the desired performance
Rover Specifications
Rover body: 2.0 m by 1.2 meter rectangle
Wheel contact points are located on a 1.5m square
Ground clearance of 0.38m
Rover wheels: 4 wheels, each 0.75m in diameter and 0.3m wide, located 1.5 m apart on center
All-wheel drive, only front wheels turn left/right
The Challenge offers up to $30,000 USD in prize money.
First place winner will receive up to $15,000
Second place winner will receive up to $10,000
Third place winner will receive up to $5000
In addition to the above cash prizes, competitors may also be considered for the following non-monetary awards:
First place winner will receive public recognition at the 2020 NIAC Symposium. Winner will also receive invitation to attend (travel costs associated with attendance not included) in September.
Invitation to visit JPL including a tour of the lab and to meet with the challenge owning engineering team to discuss the design (travel costs associated with getting to JPL not included)
Opportunity to collaborate with NASA Jet Propulsion Laboratory to develop the mechanical sensor (travel costs associated with getting to JPL not included)
Timeline
Open to submissions February 18, 2020
Submission deadline May 29, 2020 @ 5pm ET
Judging June 1 to July 2, 2020
Winners Announced July 6, 2020
How do I win?
To be eligible for an award, your proposal must, at minimum:
Satisfy the Performance Criteria described above
Thoughtfully address the Submission Form questions
Score higher than your competitors’!
Judging Scorecard
Criteria
Description
Weight
A. Likelihood of Successful Operation
Is the concept likely to meet the challenge obstacles avoidance requirements?
65% total
A.1
Does this submission include a compelling diagram/schematic of the proposed sensor?
15%
A.2
Does this submission include appropriate justification or citations for the proposed sensor?
5%
A.3
Would the system detect rocks/holes/valleys greater than 0.35 meters tall/deep?
10%
A.4
Would the system detect slopes or combinations of slopes/obstacles that could result in an angle of greater than 30 degrees?
10%
A.5
Would the system ignore rocks/holes/valleys less than 0.3 meters tall/deep?
10%
A.6
Would the design produce a 3 cm displacement of a shaft/pin with 25N of force?
5%
A.7
Is the design compatible with the current rover architecture?
Sensor must not extend more than 1m from the body of the rover
Sensor must not be more than 0.875m off the surface
Sensor must have a mass at or below 25kg
Proposed design must be capable of being assembled using environmentally appropriate materials
10%
B. Is the concept feasible to construct?
Is the design something that could actually be constructed?
Are there any practical limitations to implementing the design?
15%
C. Can the concept be adjusted to work in Venus conditions
Would the concept, if built out of the right materials, operate at Venus’s high temperatures?
Would the concept operate at Venus pressure?
20%
Your Submission
NOTE: Competitors are encouraged to present citations (or other relevant supporting information) to bolster the case for their design’s suitability for this application. Citations may be made inline with text or may be included as a piece of supporting documentation.
NOTE: Responses should include a schematic or diagram of their proposed avoidance sensor design. The diagram should be attached as a supporting document. Acceptable file formats include: WORD, PDF or JPEG. Competitors wishing to include CAD files may do so: 2D CAD files can be shared as a PDF, 3D CAD files should be shared as a Parasolid . x_t file.
Please describe, in a non-confidential way, the operation of your sensor.
Please provide a schematic diagram of your proposed sensor. Permitted file extensions: .doc, .pdf, or .jpg. CAD files may be uploaded as PDF (for 2D models) or . x_t (for 3D models). Zipped file folders acceptable.
Please provide any additional information you would like included with your submission, citations, additional diagrams, etc.). Zipped file folders acceptable.
Please indicate the performance criteria your sensor can achieve:
Move a 6cm pin a minimum of 3cm
Detect slopes greater than 30 degrees (up or down)
Detect rocks greater than 0.35m in height
Detect holes deeper than 0.35m
Please describe how your sensor is suitable for the operational environment on Venus. Consider describing how your sensor design will cope with high temperatures, high atmospheric pressure, wind, launch vibrations, etc while in operation.
Please describe the materials you anticipate needing for constructing the sensor.
Please describe the electrical power requirements of your sensor. Describe what electrical components are included in your sensor and why. If none, please indicate “Not applicable”.
Please describe how your proposed sensor will trigger the pin(s).
Please describe how your sensor meets the physical constraints of the current rover design (i.e. assembled of environmentally appropriate materials, mass ≤ 25kg, not more than 1m from rover body, not more than 0.875m off the surface)
Please indicate the current maturity level of your sensor:
Conceptual
Prototype
Engineering model available
Commercialized
Anything else you like to include about yourself and/or your proposed sensor? Possible topics: a short blurb that could be used to describe you, should you be selected as a winner in this Challenge. What inspired you to compete in this Challenge?
If you would like to supplement the information provided above with a demonstration video of your sensor, please provide a private Youtube or Vimeo link here. Please keep the duration under 5 minutes.
If you would like to supplement the information provided above with a short video pitch for your proposed sensor, please provide a private Youtube or Vimeo link here. Please keep the duration under 5 minutes.
You may submit multiple solutions.
Rules
Participation Eligibility:
The Prize is open to anyone age 18 or older participating as an individual or as a team. Individual competitors and teams may originate from any country, as long as United States federal sanctions do not prohibit participation (see: https://www.treasury.gov/resource-center/sanctions/Programs/Pages/Programs.aspx). If you are a NASA employee, a Government contractor, or employed by a Government Contractor, your participation in this challenge may be restricted.
Submissions must be made in English. All challenge-related communication will be in English.
No specific qualifications or expertise in the field of mechanical sensors is required. NASA encourages outside individuals and non-expert teams to compete and propose new solutions.
To be eligible to compete, you must comply with all the terms of the challenge as defined in the Challenge-Specific Agreement.
Intellectual Property
Innovators who are awarded a prize for their submission must agree to grant NASA a royalty free, non-exclusive, irrevocable, world-wide license in all Intellectual Property demonstrated by the winning/awarded submissions. See the Challenge-Specific Agreement for complete details.
Registration and Submissions:
Submissions must be made online (only), via upload to the HeroX.com website, on or before 5:00 pm ET on May 29, 2020. No late submissions will be accepted.
Selection of Winners:
Based on the winning criteria, prizes will be awarded per the weighted Judging Criteria section above.
Judging Panel:
The determination of the winners will be made by HeroX based on evaluation by relevant NASA specialists.
Additional Information
By participating in the challenge, each competitor agrees to submit only their original idea. Any indication of "copying" amongst competitors is grounds for disqualification.
All applications will go through a process of due diligence; any application found to be misrepresentative, plagiarized, or sharing an idea that is not their own will be automatically disqualified.
All ineligible applicants will be automatically removed from the competition with no recourse or reimbursement.
No purchase or payment of any kind is necessary to enter or win the competition.
Last week we had the pleasure of speaking with the five winners of the Exploring Hell Challenge. In this ideation challenge, innovators were tasked with designing a mechanical obstacle avoidance sensor to help the Automaton Rover for Extreme Environments (AREE) explore the brutally harsh surface of Venus.
572 entries were received from over 80 countries, and NASA found many of them to be outstanding. But the five winning submissions really stood apart from the rest. Be sure to watch this recording of the Exploring Hell Webinar as we talk with the NASA sponsors and pick the brains of our winners.
Thank you to everyone who participated, and congratulations once again to our winners!
We are thrilled to be hosting a webinar with the winners of the Exploring Hell Challenge, NASA, and HeroX! Join us next Thursday, July 23rd at 10 am PDT (Los Angeles).
This is your opportunity to learn more about the winning solutions and the teams who submitted them.
The panel discussion will be moderated by HeroX's Kal Sahota and include panelists:
Jonathan Sauder, NASA JPL
Ryon Stewart, NASA Tournament Labs
Christian Cotichini, HeroX CEO
Challenge Winners
Youssef Ghali - Venus Feelers
Team Rovetronics - Skid n' Bump – All-mechanical, Mostly Passive
Callum Heron - Direction Biased Obstacle Sensor (DBOS)
KOB ART - AMII Sensor
Matthew Reynolds - ECHOS: Evaluate Cliffs Holes Objects & Slopes
We are proud to announce the winners in the $30,000 Challenge - Exploring Hell: Avoiding Obstacles on a Clockwork Rover!
By the submission deadline, we received 572 entries from over 80 countries. The Judging Panel was so thrilled by the number of outstanding and innovative entries that NASA is recognizing an additional 12 solutions!
In addition to the $30,000 USD of planned prizes, NASA awarded an additional $4,000 split between the submission with the Most Innovative solution and the submission with the Best Prototype. Ten additional submissions are recognized as Honorable Mentions.
Additional details on the submissions can be found here. You are also invited to join us for a moderated discussion with the winners and NASA on Thursday, July 23 at 10:00 am PDT (Lost Angeles). Register Here.
While we were only able to award 5 prizes, there were very many outstanding entries and we would also like to acknowledge the following Honorable Mentions (in no particular order):
"Vibrissae Inspired Mechanical Avoidance Sensor" byARChaic Team
"V-Track with Scotch Yoke Clinometer – Prototype" by Jason McCallister
We would like to take this opportunity to thank everyone who entered the challenge. While we were only able to recognize a small fraction of those who entered, there were so many other insightful solutions, we are confident that many of the participants will do great things in the future. Thank you all for helping make this challenge a huge success.
We would also like to thank all of our supporters, partners, judges, and anyone else who in any way contributed to our competition community. Without you, we would not have had the challenge that we did.
We are quickly approaching the final days open for submission to the Exploring Hell Challenge The deadline is Friday, May 29 at 5:00 pm Eastern Time (New York/USA).
Here are a couple of last-minute tips for a smooth entry process:
1. Begin your submission process several days before the cutoff time. This allows you to ensure everything you have been working on can be seamlessly integrated into the form.
2. Your submission will not be reviewed until you click the orange "Submit Entry" button at the top of the final review page. Please remember to do this! Once submitted, you will receive a confirmation email.
3. Review the Challenge Guidelines to ensure your submission is complete. Pay particular attention to the judging criteria which will be the scorecard used to evaluate your entry.
There's exactly one week left to submit your solution tothe Exploring Hell Challenge!
You're so close. You can do this!
Remember, the final submission deadline is Friday, May 29 at 5:00 pm Eastern Time (New York/USA). No submissions received after this time will be accepted, so make sure to get yours in as soon as possible.
If you haven't already, we recommend watching the recording from last week's webinar: