




In their ongoing pursuit of robots that can handle any task - from assisting people with special needs, to navigating disaster areas, or building everyday objects - scientists and researchers are increasingly looking to the natural world for inspiration. Whether it is robots designed to move like animals so as to navigate tough terrain - like Boston Dynamics' Cheetah and LS3 designs - or tiny machines inspired by ants, bees and other insects, the lesson is clear: nature holds the blueprints.
Following this lesson, Associate Professor Sarah Bergbreiter and her research team from the University of Maryland designed a series of micro-robots no bigger than a grain of rice, and designed to mimic the behavior of insects. As the subject of a TED Talk at last year's TEDYouth 2014: Worlds Imagined, she explained how studying the movement and bodies of insects such as ants inspired their design, and how such tiny robots might help us in the future.
![]() As a member of the Maryland Robotics Center, Bergbreiter has been working in the fields of microrobotics, as well as micro-electronic and micro-mechanical engineering, since 2008. Since that time, she has been working towards creating a breed of tiny robots that would be capable of doing anything from providing disaster site inspections to building entire structures on their own.
As a member of the Maryland Robotics Center, Bergbreiter has been working in the fields of microrobotics, as well as micro-electronic and micro-mechanical engineering, since 2008. Since that time, she has been working towards creating a breed of tiny robots that would be capable of doing anything from providing disaster site inspections to building entire structures on their own.
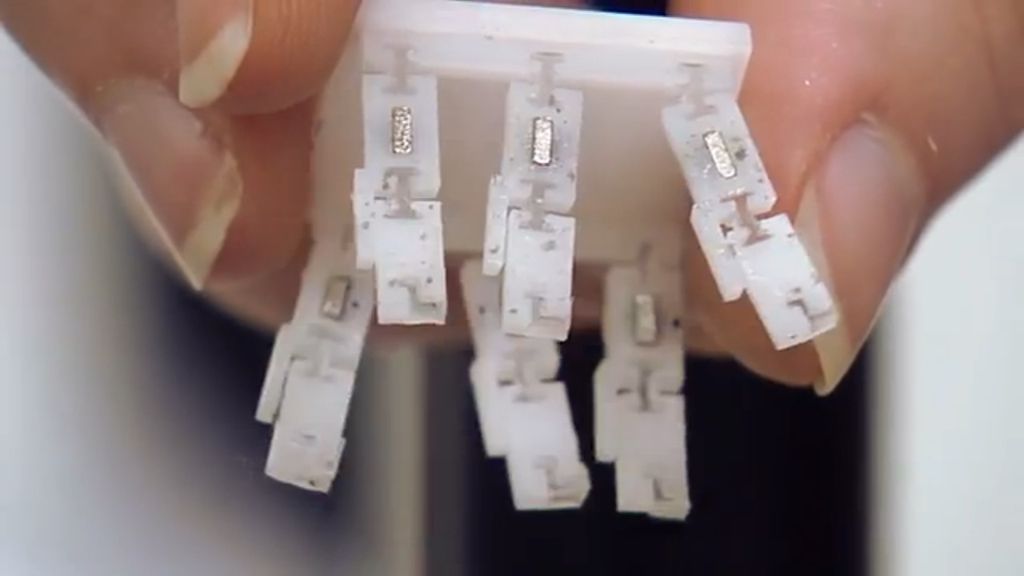
With the support of the National Science Foundation (NSF), the team began desinging micro-robots using insects as their inspiration - starting with the legs. Not surprsing, since most insects are not only capable of navigating difficult and uneven terrain to seek out food, find shelter and evade predators, they are also capable of carrying many times their own weight and generating incredible thrust to jump clear of water and obstacles.
This was no easy task, and the team began by experimenting with materials on larger-sized robots and then scaling them down. Eventually, they adopted the approach of combining rigid and soft materials in very small mechanisms - which consisted of silicon components for the shells and silicone rubber for the moving parts.
The combination of these materials allowed the robots to move and jump quite well - a 4 mm robot was capable of jumping 40 cm high (over 100 times its own length). Using tweezers, the jump tests were conducted by having a student compress the robots legs and then releasing them. The robots managed to jump repeatedly without any stress of damage to their moving parts, which showed incredible durability as well.
The next step, according to Bergbreiter, is to develop millimeter-sized motors to integrate into their robots. But in the meantime, they used magnets to test the mobility of the legs. Again, fashioning larger robots on the centimeter-scale, they were able to demonstrate the effectiveness of their leg design by getting the robots to run around at a speed of 10 cm per second.
Bergbreiter envisions these micro-robots as mobile sensor platforms that can move through real-world environments at insect-like speeds for a variety of purposes, such as searching through small cracks in rubble after natural disasters, or providing cheap sensing or surveillance in inaccessible areas. Such robots would give rescue workers access to sites that are inaccessible to humans, as well as sparing human crews from potentially dangerous situations.
"This is a very worthwhile effort and is just the beginning of what we hope will be achieved in the future when these micro-robots are equipped with video sensors and wireless communications," said George Haddad, a program director in the Division of Electrical, Communications and Cyber Systems within NSF's Directorate for Engineering.
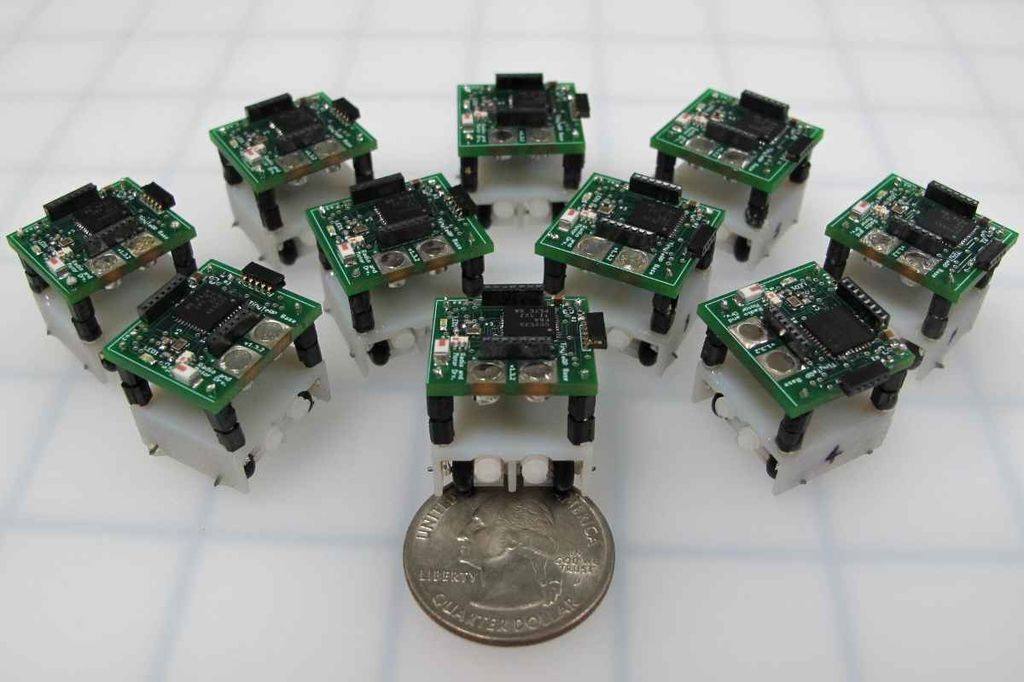
Another potential application, which Bergbreiter and her colleagues are exploring, is the use of such tiny robots to scale bridges and check them for cracks. Along with fellow UMD professors Nuno Martins and Richard La, they have recieved a three-year, $850,000 grant from the NSF to design, build, and deploy a swarm of miniature robots for just this purpose.
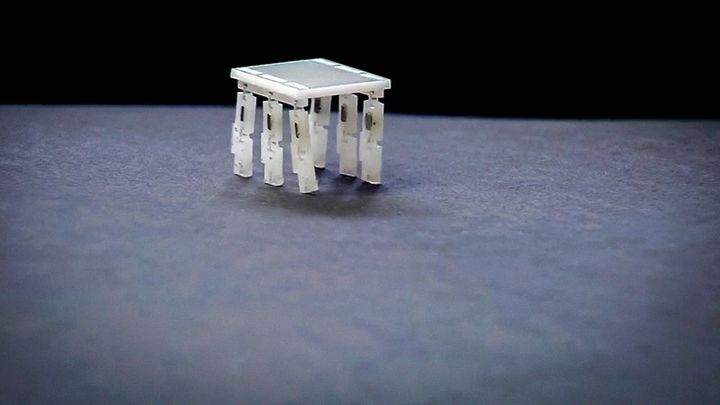
Towards, this end, they developed the Tiny Terps (pictured above), robots that measure on the centimeter-scale that could someday aid in bridge inspection by climbing around on them, traversing the tricky setup of rivets and bolts on their undersides, and working together with minimal human oversight to store and relay images and measurements related to the strenght and stability of the bridge.
But ultimately, what Bergbreiter and her colleagues want is to create tiny robots that are have everything on board. Basically, this means creating centimiter and millimeter-scale machines that have sensing, power, control and actuation together in one package. Also, instead of magnets or tweezers, she and her colleagues are creating tiny "rockets" to make their robots jump. These consist of pixels placed on the bellies of the robots fashioned from micro-fabricated energetic material that reacts with an increase of light.
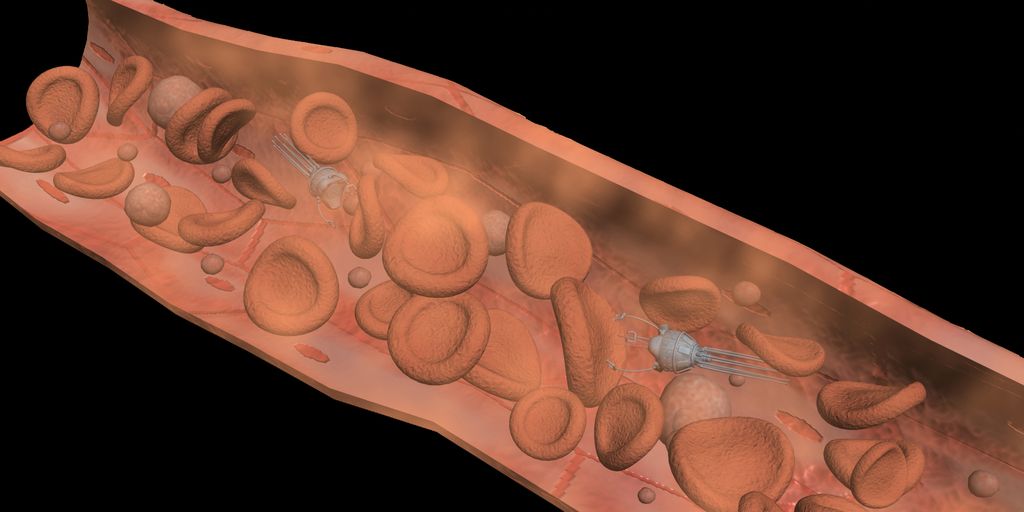
Looking even farther ahead, Bergbreiter imagines a world where even tinier robots (i.e. measured on the nanoscale) could swim through a person's bloodstream - monitoring their organs for signs of disease or pathogens and eliminating the need for invasive surgery - or even using "swarm robotic" behavior to construct entire buildings the same way insects create their habitats.
Given time and refinements, the applications of such tiny robots really are quite limitless. Imagine if you will robots no bigger than a grain of rice, and numbering in the thousands, being sent to Mars or beyond in order to conduct scientific research. Or perhaps tiny swarms of helpful nanobots that remove plaque from your arteries, remove cancerous cells, or inject medicines to where its needed the most.
Yes, when it comes to robotics, the future is not only taking its cue from the natural world, but moving towards smaller and smaller scales.
*Bergbreiter is the recipient of a Presidential Early Career Award for Scientists and Engineers (PECASE) in 2013; an NSF CAREER Award for "Microrobot Legs for Fast Locomotion over Rough Terrain,? in 2011; and a DARPA Young Faculty Award in 2008. She also has been the principal investigator for an NSF Research Experiences for Undergraduates in microrobotics.
And be sure to check out the video of Bergbreiter's talk at TedYouth2014:
And this UMD video explaining their micro-robot concept, titled "As fast as their tiny 'robot' legs will carry them!":
Sources:
- www.ted.com/talks/sarah_bergbreiter
- www.ted.com/attend/conferences/special-events/tedyouth
- www.ee.umd.edu/html/news/news_story.php?id=8785
- robotics.umd.edu/news/news_story.php?id=8785
- http://terp.umd.edu/tiny-robots-big-plans/#.VM1-ry5FW-c
- https://sites.google.com/site/microroboticslaboratory/tinyterp
- www.nsf.gov/news/special_reports/science_nation/microrobotlegs.jsp?WT.mc_id=USNSF_51
Image Credits:
- Top Image: ted.com
- Insect-robots: techachute.com/Alexander Wild
- Bug-bot: pbs.org
- Tiny Terps: sites,google.com/site/microroboticslaboratory
- Medical nanorobots: nanotech-now.com/Svidinenko Yuriy